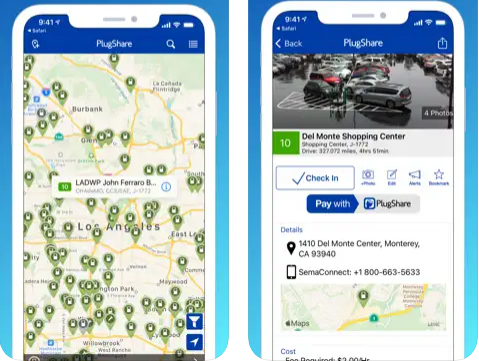
If you are a new owner of an electric vehicle (EV) or are planning to rent one, you might be worried about how to find a charger if you need one. Maybe you are planning a road trip, need to drive long distances for work, or just want to know where to find one on your way to or from a destination. Luckily, there are several EV trip planners available, both in online and app … [Read more...] about The Best EV Trip Planners: Top tools + route planning
Future Mobility

What does mobility in the future actually look like? How will our cities develop? What will happen to transportation? These are the questions we wanted to pursue and interview experts about. The journey will take us to the state of Georgia, all over Europe and to South America. Our project includes articles focusing on Spain, Italy, France, Sweden, England, the USA and even Brazil. There are interviews with people who are working on vehicles of the future, and articles that deal with the question of how we must rethink transportation as a society so that the world of tomorrow does not sink into chaos. [Read more...]
In the Future, Your EV Might be Made of Cardboard & Recycled Plastic

The materials used to make cars in the US have evolved over the years, with steel and other metals evolving into a mix of metal and plastic. But in an effort to be more environmentally friendly, some automakers are moving toward using more sustainable and recycled materials in their electric vehicles (EVs). Companies like Ford, Citröen, Hyundai and Polestar have announced … [Read more...] about In the Future, Your EV Might be Made of Cardboard & Recycled Plastic
How Much Does EV Charging Cost?

Demand for electric vehicles (EVs) is increasing as more states push EV sales, the government continues to give tax breaks for purchasing one, and gas prices remain unpredictable. In fact, there are months-long waits for new electric cars, partially due to the spike in gas prices in the first part of 2022, and also because of the Clean Vehicle Credit. The latter gives a $7,500 … [Read more...] about How Much Does EV Charging Cost?
10 Cheapest Electric Cars in the US

For some people, buying an electric vehicle seems out of reach. The good news is that there are now more choices of models than ever before, and with more EVs on the market, prices have gone down. While you can still spend almost $100,000 on a luxury EV, there are plenty of models well under $50,000. We’ve rounded up 10 of the cheapest electric vehicles for sale in the US, from … [Read more...] about 10 Cheapest Electric Cars in the US
How do Hybrid Cars Work?
Whether it's rising gas prices, protecting the climate or the forward-looking benefits of an electric car, there are many reasons to move away from the pure internal combustion engine. However, vehicles that carry their fuel in a tank have advantages in some areas over those purely powered by a battery and electric motor. Hybrid cars represent a compromise between these … [Read more...] about How do Hybrid Cars Work?